Monografie
Planning and Control Methods for Robotic Manipulation Tasks with Non-Negligible Dynamics
- Sprache
-
Englisch
- Anmerkungen
-
München, Technische Universität München, Diss., 2011
- Identifier
-
1021422320
- Thema
-
Hochschulschrift
- Beteiligte Personen und Organisationen
- URN
- Rechteinformation
-
Der Zugriff auf das Objekt ist unbeschränkt möglich.
- Letzte Aktualisierung
-
26.01.2023, 13:56 MEZ
Datenpartner
Dieses Objekt wird bereitgestellt von:
Deutsche Nationalbibliothek. Bei Fragen zum Objekt wenden Sie sich bitte an den Datenpartner.
Deutsche Nationalbibliothek. Bei Fragen zum Objekt wenden Sie sich bitte an den Datenpartner.
Objekttyp
- Monografie
Beteiligte
- Bätz, Georg Rudolf Sebastian
- Buss, Martin
- Knoll, Alois
Ähnliche Objekte (12)
![Aus Frankreich : die Gemeinde-Industrieschule in Straßburg ; [Nachrichten]](https://iiif.deutsche-digitale-bibliothek.de/image/2/37cdb80b-0ef7-4252-b4bb-db2e785a0dcd/full/!306,450/0/default.jpg)
Aus Frankreich : die Gemeinde-Industrieschule in Straßburg ; [Nachrichten]
![¬Der¬ französische Primär-Unterricht im Jahre 1837 : ein Blick auf die Statistik desselben ; [Schulnachrichten]](https://iiif.deutsche-digitale-bibliothek.de/image/2/867daf3e-c718-46f5-b849-0d69ad775177/full/!306,450/0/default.jpg)
¬Der¬ französische Primär-Unterricht im Jahre 1837 : ein Blick auf die Statistik desselben ; [Schulnachrichten]
Rede über die Präceptorate in Landstädten und deren Umstaltung in Realschulen : bei der Versammlung der lateinischen Lehrer des Donaukreises am 27. Octbr. 1836
Ueber das Wesen der Geschichte, ihre Nothwendigkeit und Behandlungsart in christlichen Schulen : zweite Abhandlung
![Selbstmord zweier Schüler : [Mannigfaltiges]](https://iiif.deutsche-digitale-bibliothek.de/image/2/6cd264af-f3c1-4e6c-b552-3af51c7f0aa9/full/!306,450/0/default.jpg)
Selbstmord zweier Schüler : [Mannigfaltiges]
![Aus Frankreich : ueber den Dienst der unentgeldlichen Schulen und Aufenthaltsstuben in Straßburg ; [Schulnachrichten]](https://iiif.deutsche-digitale-bibliothek.de/image/2/26e9bf5f-eb2b-4e1c-a27d-542cb14de00b/full/!306,450/0/default.jpg)
Aus Frankreich : ueber den Dienst der unentgeldlichen Schulen und Aufenthaltsstuben in Straßburg ; [Schulnachrichten]
Rede über die Präceptorate in Landstädten und deren Umstaltung in Realschulen : (Fortsetzung und Beschluß)
Ueber das Wesen der Geschichte, ihre Nothwendigkeit und Behandlungsart in christlichen Schulen : erste Abhandlung
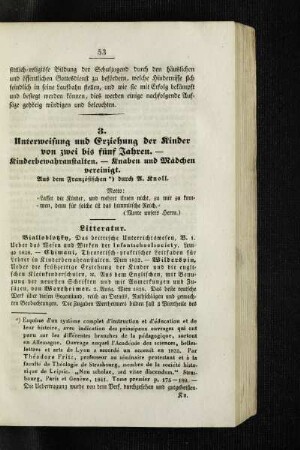
Unterweisung und Erziehung der Kinder von zwei bis fünf Jahren - Kinderbewahranstalten - Knaben und Mädchen vereinigt
![Aus Oesterreich : das Schullehrer-Wittwen- und Waisenpensionsinstitut des Salzburgerkreises ; [Schulnachrichten]](https://iiif.deutsche-digitale-bibliothek.de/image/2/92f7dd2c-2534-4f50-a159-64ef461054e8/full/!306,450/0/default.jpg)
Aus Oesterreich : das Schullehrer-Wittwen- und Waisenpensionsinstitut des Salzburgerkreises ; [Schulnachrichten]
![Korrespondenz-Journal : [Schulnachrichten]](https://iiif.deutsche-digitale-bibliothek.de/image/2/81d4de6b-a426-4131-be8d-925aeb5d7581/full/!306,450/0/default.jpg)
Korrespondenz-Journal : [Schulnachrichten]
![¬Die¬ französischen Schulbücher : [Mannigfaltiges]](https://iiif.deutsche-digitale-bibliothek.de/image/2/a7d41fc3-aedd-4520-8619-29ed0c9d41d5/full/!306,450/0/default.jpg)
¬Die¬ französischen Schulbücher : [Mannigfaltiges]
Aus Frankreich : die Gemeinde-Industrieschule in Straßburg ; [Nachrichten]
¬Der¬ französische Primär-Unterricht im Jahre 1837 : ein Blick auf die Statistik desselben ; [Schulnachrichten]
Rede über die Präceptorate in Landstädten und deren Umstaltung in Realschulen : bei der Versammlung der lateinischen Lehrer des Donaukreises am 27. Octbr. 1836
Ueber das Wesen der Geschichte, ihre Nothwendigkeit und Behandlungsart in christlichen Schulen : zweite Abhandlung
Selbstmord zweier Schüler : [Mannigfaltiges]
Aus Frankreich : ueber den Dienst der unentgeldlichen Schulen und Aufenthaltsstuben in Straßburg ; [Schulnachrichten]
Rede über die Präceptorate in Landstädten und deren Umstaltung in Realschulen : (Fortsetzung und Beschluß)
Ueber das Wesen der Geschichte, ihre Nothwendigkeit und Behandlungsart in christlichen Schulen : erste Abhandlung
Unterweisung und Erziehung der Kinder von zwei bis fünf Jahren - Kinderbewahranstalten - Knaben und Mädchen vereinigt
Aus Oesterreich : das Schullehrer-Wittwen- und Waisenpensionsinstitut des Salzburgerkreises ; [Schulnachrichten]
Korrespondenz-Journal : [Schulnachrichten]
¬Die¬ französischen Schulbücher : [Mannigfaltiges]
Aus Frankreich : die Gemeinde-Industrieschule in Straßburg ; [Nachrichten]
¬Der¬ französische Primär-Unterricht im Jahre 1837 : ein Blick auf die Statistik desselben ; [Schulnachrichten]
Rede über die Präceptorate in Landstädten und deren Umstaltung in Realschulen : bei der Versammlung der lateinischen Lehrer des Donaukreises am 27. Octbr. 1836
Ueber das Wesen der Geschichte, ihre Nothwendigkeit und Behandlungsart in christlichen Schulen : zweite Abhandlung
Selbstmord zweier Schüler : [Mannigfaltiges]
Aus Frankreich : ueber den Dienst der unentgeldlichen Schulen und Aufenthaltsstuben in Straßburg ; [Schulnachrichten]
Rede über die Präceptorate in Landstädten und deren Umstaltung in Realschulen : (Fortsetzung und Beschluß)
Ueber das Wesen der Geschichte, ihre Nothwendigkeit und Behandlungsart in christlichen Schulen : erste Abhandlung
Unterweisung und Erziehung der Kinder von zwei bis fünf Jahren - Kinderbewahranstalten - Knaben und Mädchen vereinigt
Aus Oesterreich : das Schullehrer-Wittwen- und Waisenpensionsinstitut des Salzburgerkreises ; [Schulnachrichten]
Korrespondenz-Journal : [Schulnachrichten]